
Object pose estimation with on-line data synthesis using point clouds at ICRA 2021
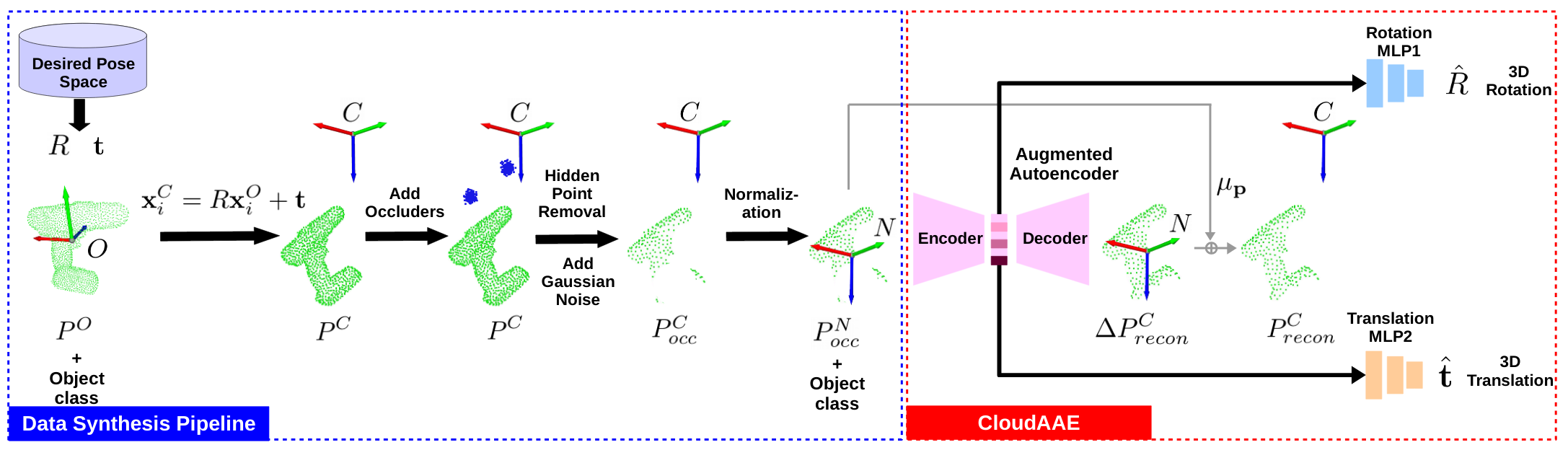
With Ge Gao, Xiaolin Hu, Jianwei Zhang, and Simone Frintrop, we propose an augmented autoencoder based approach for estimating the translation and rotation of objects given point cloud data. I am happy to announce that this paper is now accepted for presentation at the International Conference on Robotics and Automation (ICRA 2021)! Interestingly, we show that using only synthetic data generated by a simple on-line synthesis method is enough to reach good performance on some challenging datasets.
You can check the arXiv preprint here for details, and find the implementation of the system on GitHub. Stay tuned for the presentation of the paper at the conference.